Building Procedures: Parts List
For simply making a functional prototype that showcases the bare minimum of functions, we need the following:
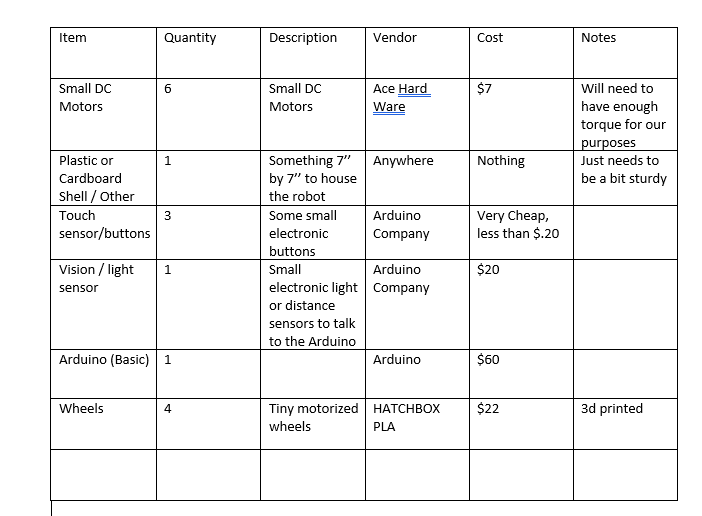
A 7 by 7 plastic or cardboard box, an Arduino, 6 small DC motors, a touch sensor and a light/distance sensor, small buttons,
batteries, resistors, paper towels, a light tube around 2.5in in diameter, four tiny wheels, metal axles, a bread board.
A 7 by 7 plastic or cardboard box, an Arduino, 6 small DC motors, a touch sensor and a light/distance sensor, small buttons,
batteries, resistors, paper towels, a light tube around 2.5in in diameter, four tiny wheels, metal axles, a bread board.
Building Procedures: Tools and Equipment
Building the prototype may take two weeks at least, but most likely more time would be needed if we had the materials. Unfortunately we do not have the materials necessary to build our desired prototype due to the current world conditions.
Tools Needed:
Electrical tape, normal tape, hot glue, scissors, drill/other method of hole-making, computer.
Tools Needed:
Electrical tape, normal tape, hot glue, scissors, drill/other method of hole-making, computer.
Building Procedures: Build Procedure
1. Assemble the basic circuitry of the whole robot outside its casing. This means attaching all the components to their right spots on the Arduino and breadboard. This will be used to test the programming first.
2. Program the basic functions on the robot. Does not have to be perfect yet.
3. Begin attaching the electronics to the shell of the robot. The Arduino can simply be placed on top of the box and holes will be cut in the top to allow wires and other things to pass inside. One button can be taped or otherwise attached to the designated front of the box, while another button is attached to the top of the box on the breadboard, and the light sensor is attached to the bottom inside the front of the box.
2. Program the basic functions on the robot. Does not have to be perfect yet.
3. Begin attaching the electronics to the shell of the robot. The Arduino can simply be placed on top of the box and holes will be cut in the top to allow wires and other things to pass inside. One button can be taped or otherwise attached to the designated front of the box, while another button is attached to the top of the box on the breadboard, and the light sensor is attached to the bottom inside the front of the box.
Building Procedures: "In-Build" Refinements
Tweaking the code so that the robot can effectively turn 180 degrees and path around walls or edges.
Tweaking how fast the cloth-spinners spin for effective cleaning.
Tweaking how much spray comes out for effective cleaning.
Changing the material of the wheels.
Tweaking how fast the cloth-spinners spin for effective cleaning.
Tweaking how much spray comes out for effective cleaning.
Changing the material of the wheels.
Bill of Materials